Project Overview
Complete redesign of our search and rescue robot for RoboCup 2023’s RMRC category, introducing autonomous navigation capabilities:
- LiDAR-based 2D environment mapping
- Semi-autonomous operation in disaster simulation zones
- Enhanced sensor array for hazard detection
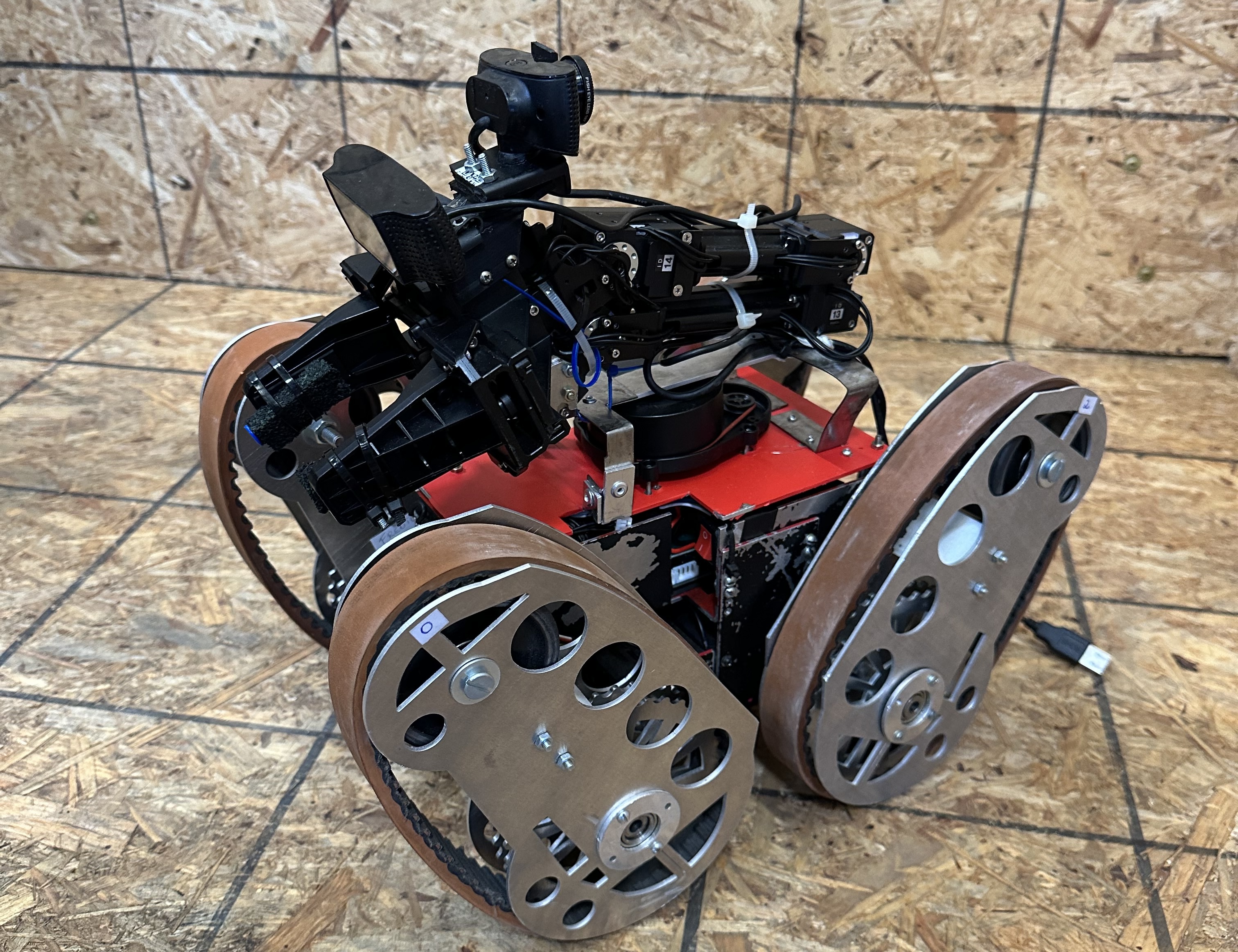
- Improved mobility in debris-filled areas, including stair climbing
Project Post: RoboCup 2023 - Search and Rescue Robot
Technical Implementation
Advanced features also include:
- Reliable driving algorithm, based on the 2D generated map
- All-new ROS implementation
- Improved sensors for more precise hazard detection
- Custom-built metal chassis for durability
Key Achievements
-
Awarded “Best in Class: Mapping” for:
-
First-ever 2D environment mapping in RMRC
-
Semi-autonomous navigation capabilities
-
Real-time map generation
-
Placed 4th out of 11 international teams at RoboCup 2023 in Bordeaux, France
Impact
This iteration marked several milestones:
- Creation of a new award category (Best in Class: Mapping) at RoboCup
- Enhanced Insper’s standing in the RoboCup community
- Generated academic opportunities:
- National robotics competition invitations
- Master’s program scholarships for team members